中华人民共和国国家标准
产品几何量技术规范(GPS) GB/T 16857.1-200X
坐标测量机的验收检测和复检检测 eqv ISO 10360-1:2000
第 1 部分:词汇
Geometrical Product Specification (GPS)-Acceptance and Re-verification tests for Coordinate Measuring Machines
-Part I:Vocabulary
9 有关坐标测量机误差或示值误差的术语
9.1 坐标测量机尺寸测量的示值误差 (E) error of indication of a CMM for size measurement
用坐标测量机(2.1)从相反两方向接近探测点,测定尺寸实物标准器(8.2)的两标称平行平面间的法向(与一个面正交的)两相对点距离的示值误差。
注:对实物标准的测量是通过两相对表面上(与一个面正交的)两相对点进行。当从相反两方向接近该两点时,见图11a)和11b)。

图 11 测量方向
9.2 坐标测量机尺寸测量的最大允许示值误差 maximum permissible error of indication of a CMM for size measurement
由坐标测量机(2.1)的规范、规程等所允许的坐标测量机尺寸测量的示值误差E(9.1)的极限值。
注1;坐标测量机尺寸测量的最大允许示值误差(MPEE)以下列三个表达式的任一式表示:
a)MPEE = ±(A+L/K)和 MPEE = ±B 的较小值 (见图 12)
b)MPEE = ±(A+L/K) (见图 13)
c)MPEE = ±B (见图 14)
式中:
A 正常数,µm,由坐标测量机制造商提供;
K 无量纲常数,由坐标测量机制造商提供;
L 被测长度,mm;
B 最大允许误差 MPEE ,µm;由坐标测量机制造商提供。
注2:上列表达式适用于将尺寸实物标准器(8.2)放在坐标测量机测量空间(2.3)的任何位置和方向的测量。
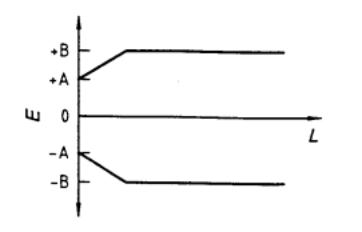
图 12 坐标测量机尺寸测量的最大允许示值误差 MPEE (见9.2)

图 13 坐标测量机尺寸测量的最大允许示值误差 MPEE (见 9.2,注1.b)
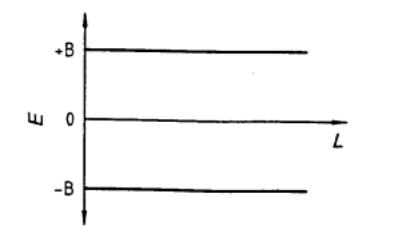
图 14 坐标测量机尺寸测量的最大允许示值误差 MPEE(见 9.2,注 1.c)
9.3 探测误差 (P) probing error
用坐标测量机测定球形尺寸实物标准器(8.2)的半径范围(2.21)在检测球上用单个探针(4.1)以离散点探测(2.8)方式进行测量。见图15。
注: P 是一个正值。

注: P<=MPEP
图 15 探测误差 P
9.4 最大允许探测误差 (MPEP)maximum permissible probing error
由坐标测量机(2.1)的规范、规程等所允许的探测误差P(9.3)的极限值,见图15。
注1:坐标测量机的最大允许探测误差 MPEP 表达为:
MPEP=A
式中: A 是正常数,µm。
注2:MPEP 值适用于球形尺寸实物标准器(8.2)在坐标测量机测量空间(2.3)内的任一位置和任一探测方向。
9.5 径向四轴误差 (FR) radial four-axis error
用转台(5.1)的轴线作为第四轴的坐标测量机在工件坐标系统(2.4)内测得的检测球(8.4)中心位置的示值误差的径向范围。
9.6 切向四轴误差 (FR) tangential four-axis error
用转台(5.1)的轴线作为第四轴的坐标测量机在工件坐标系统(2.4)内测得的检测球(8.4)中心位置的示值误差的切向范围。
9.7 轴向四轴误差 (FA) axial four-axis error
用转台(5.1)的轴线作为第四轴的坐标测量机在工件坐标系统(2.4)内测得的检测球(8.4)中心位置的示值误差的轴向范围。
9.8 最大允许径向四轴误差 (MPEFR) maximum permissible radial four-axis error
由转台(5.1)的轴线作为第四轴的坐标测量机的规范、规程等所允许的径向四轴误差 FR(9.5)的极限值。
9.9 最大允许切向四轴误差 (MPEFT) maximum permissible tangential four-axis error
由转台(51)的轴线作为第四轴的坐标测量机的规范、规程等所允许的切向四轴误差 FT(9.6)的极限值。
9.10 最大允许轴向四轴误差 (MPEFA) maximum permissible axial four -axis error
由转台(5.1)的轴线作为第四轴的坐标测量机的规范、规程等所允许的轴向四轴误差 FA(9.7)的极限值。
9.11 扫描探测误差 (Tij) scanning probing error
用坐标测量机(2.1)测定检测球(8.4)的半径变化范围(2.21)。在检测球(8.4)上用单个探针 (4.1) 以扫描(2.9)方式进行测量。
注:根据高点密度(7.8)或低点密度(7.9)及预定路径扫描(7.5)或非预定路径扫描(7.6)的不 同组合,可有以下四种扫描探测误差:
点密度 |
预定路径 (j=P) |
非预定路径 (j=N) |
高(i=H) |
THP |
THN |
低(i=L) |
TLP |
TLN |
9.12 最大允许扫描探测误差 (MPETij) maximum permissible scanning probing error
由坐标测量机(2.1)的规范、规程等所允许的扫描探测误差 Tij(9.11)的极限值。
注1:MPETij;值是一个正常数,适用于探测球(8.4)处于坐标测量机测量空间区(2.3)内任何位置和任意探测方向。
注2:对四种组合的每一种,可规定 MPETij 的不同值。
9.13 扫描检测时间 (T) time for scanning test
由程序规定的从扫描顺序(7.7)第 1 步开始到扫描顺序结束所经过的时间。
9.14 最大允许扫描检测时间 (MPT t) maximum permissible time for scanning test
由坐标测量机(2.1)的规范、规程等所允许的扫描检测时间τ(9.13)的极限值。
9.15 固定多探针探测系统形状误差 (MF) fixed multiple-stylus probing system form error
在坐标测量机(2.1)上用固定多探针(3.8)以离散点探测(2.8)方式在检测球(8.4)上进行测量,用最小二乘法近似处理各点,测得的球形尺寸实物标准器(8.2)半径变化的范围(2.21)。
9.16 固定多探针探测系统尺寸误差 (MS)fixed multiple stylus probing system size error
在坐标测量机(2.1)上用固定多探针(3.8)以离散点探测(2.8)方式在检测球(8.4)上进行测量,用最小二乘法近似处理各点,测定球形尺寸实物标准器(8.2)直径的示值误差。
9.17 固定多探针探测系统位置误差 (ML)fixed multiple stylus probing system location error
在坐标测量机(2.1)上用固定多探针(3.8)以离散点探测(2.8)方式在检测球(8.4)上进行测量, 用最小二乘法近似处理各点,测定的球形尺寸实物标准器(8.2)中心坐标变化的范围(2.21)。
9.18 最大允许固定多探针探测系统形状误差 (MPEMF)maximum permissible fixed multiple-stylus probing system form error
由坐标测量机(2.1)的规范、规程等所允许的固定多探针探测系统形状误差MF(9.15)的极限值。
注: MPEMF 可由探针长度(4.5)和探针系统(4.4)规定。
9.19 最大允许固定多探针探测系统尺寸误差 (MPEMS)maximum permissible fixed multiple-stylus probing system size error
由坐标测量机(2.1)的规范、规程等所允许的固定多探针探测系统尺寸误差MS(9.16)的极限值。
注: MPEMS 可由探针长度(4.5)和探针系统(4.4)规定。
9.20 最大允许固定多探针探测系统位置误差 (MPEML)maximum permissible fixed multiple-stylus probing system position error
由坐标测量机(2.1)的规范、规程等所允许的固定多探针探测系统位置误差ML(9.17)的极限值。
注: MPEML 可由探针长度(4.5)和探针系统(4.4)规定。
9.21 万向探测系统形状误差 (AF) articulated probing system form error
在坐标测量机(2.1)上用万向探测系统(3.6)以离散点探测(2.8)方式在检测球(8.4)上进行测量,用最小二乘法近似处理各点,测定的球形尺寸实物标准器(8.2)半径变化的范围(2.21)。
9.22 万向探测系统尺寸误差 (AS) articulated probing system size error
在坐标测量机(2.1)上用万向探测系统(3.6)以离散点探测(2.8)方式在检测球(8.4)上进行测量,用最小二乘法近似处理各点,测定的球形尺寸实物标准器(8.2)直径变化的范围(2.21)。
9.23 万向探测系统位置误差 (AL) articulated probing system location error
在坐标测量机(2.1)上用万向探测系统(3.6)以离散点探测(2.8)方式在检测球(8.4)上进行测量,用最小二乘法近似处理各点,测定的球形尺寸实物标准器(8.2)中心坐标变化的范围(2.21)。
9.24 最大允许万向探测系统形状误差 (MPEAF)maximum permissible articulated probing system form error
由坐标测量机(2.1)的规范、规程等所允许的万向探测系统形状误差 AF(9.21)的极限值。
注: MPEAF 可由测头加长杆和探针系统(4.4)规定。
9.25 最大允许万向探测系统尺寸误差 (MPEAs)maximum permissible articulated probing system size error
由坐标测量机(2.1)的规范、规程等所允许的万向探测系统尺寸误差AS(9.22)的极限值。
注: MPEAs 可由测头加长杆和探针系统(4.4)规定。
9.26 最大允许万向探测系统位置误差 (MPEAL)maximum permissible articulated probing system position error
由坐标测量机(2.1)的规范、规程等所允许的万向探测系统位置误差 AL(9.23)的极限值。
注: MPEAL 可由测头加长杆和探针系统(4.4)规定。

 页面位置 :
页面位置 :

